
")
Описание
Командоконтроллер ККТ-61 — крановый контроллер управления электродвигателями
Производитель: Техно-Маркет
Гарантия: 12 месяцев | Контроль качества на каждом этапе производства.
Командоконтроллер ККТ-61
— это промышленный кулачковый крановый контроллер, предназначенный для управления асинхронными электродвигателями с фазным ротором в электроприводах подъемно-транспортных механизмов. Контроллер используется для пуска, остановки, реверса и ступенчатого регулирования скорости вращения электродвигателей кранового оборудования.
ККТ-61 применяется в приводах электродвигателей типов:
МТН
МТF
МТК
других крановых электродвигателей
Контроллер обеспечивает надежное управление электроприводом при интенсивной эксплуатации и частых включениях.
Область применения контроллера ККТ-61
Командоконтроллеры ККТ-61 широко применяются в системах управления промышленного оборудования:
мостовые краны
козловые краны
портальные краны
башенные краны
грузоподъёмные механизмы
лебёдочные установки
промышленное подъёмно-транспортное оборудование
Контроллер обеспечивает ступенчатое управление скоростью и направлением вращения электродвигателя.
Основные технические характеристики
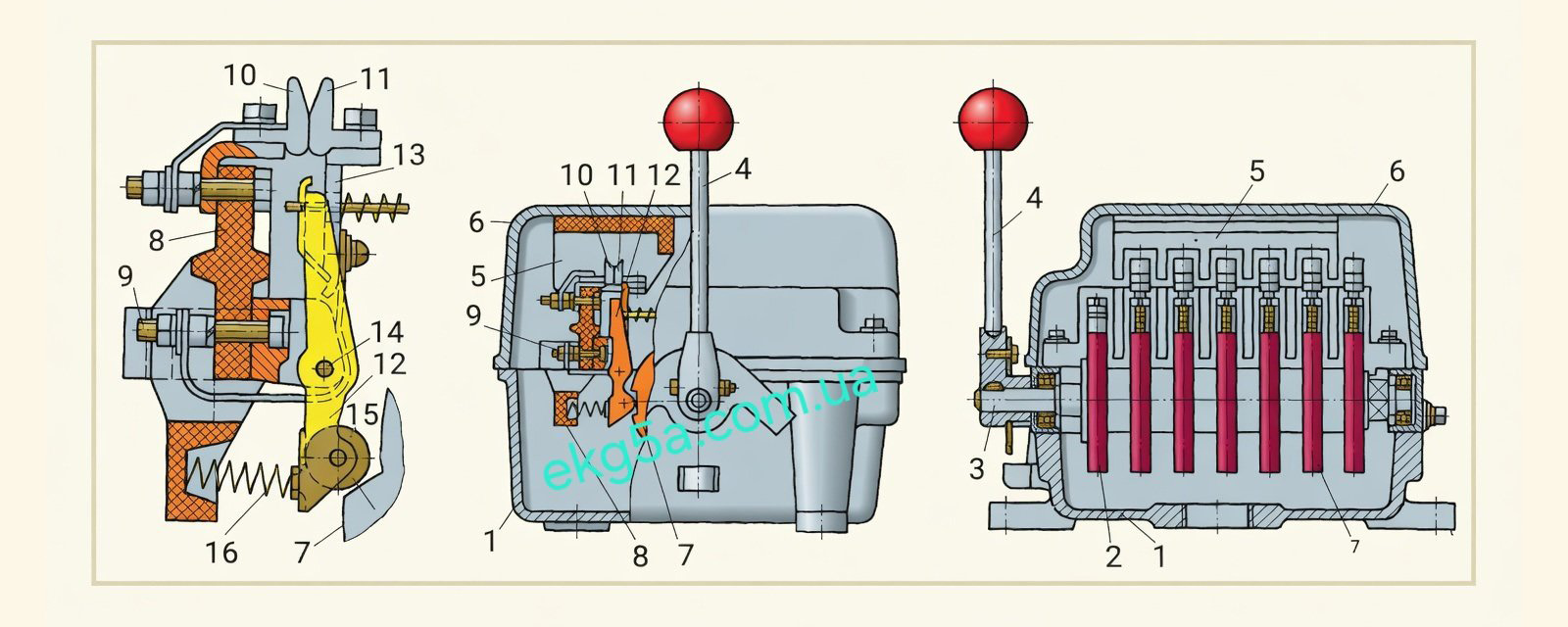
Устройство контроллера ККТ-61:
Корпус — внешняя оболочка, защищающая внутренние механизмы.
Храповое колесо — обеспечивает четкую фиксацию рукоятки в рабочих положениях.
Вал — центральный элемент, на котором закреплены кулачковые шайбы.
Рукоятка — рычаг управления для переключения режимов.
Камера — дугогасительный элемент для защиты контактов.
Крышка — съемная часть для доступа к внутренним узлам.
Кулачковая шайба — задает алгоритм (диаграмму) замыкания контактов.
Пластмассовая рейка — изоляционное основание для крепления контактных групп.
Неподвижный зажим — место крепления внешних проводов.
Неподвижный контакт — закрепленный медный контакт цепи.
Подвижный контакт — замыкающий элемент, расположенный на рычаге.
Контактный рычаг — подвижная часть, передающая усилие от кулачка к контакту.
Держатель — фиксирует узлы контактной группы.
Ось — точка вращения контактных рычагов.
Ролик — катится по профилю кулачковой шайби, приводя в движение рычаг.
Возвратная пружина — обеспечивает необходимое давление контактов и возврат рычага.
Принцип работы командоконтроллера
Контроллер ККТ-61 работает на основе кулачкового механизма. При повороте рукоятки кулачковые шайбы воздействуют на контактные рычаги, в результате чего происходит замыкание и размыкание электрических цепей. Это изменяет схему подключения сопротивлений в роторной цепи двигателя, обеспечивая:
плавный пуск электродвигателя;
ступенчатую регулировку скорости;
торможение;
реверс вращения.
Модификации контроллеров ККТ-61
В зависимости от производителя встречаются следующие исполнения: ККТ-61А, ККТ-61М, ККТ-61МВ, ККТ-61МТ, ККТ-61СУ, ККТ-61ЭТ, ККТ-61У2. Все модификации имеют аналогичный принцип работы и схему коммутации.
Производство и контроль качества
Командоконтроллеры ККТ-61 изготавливаются контрактным производителем ПП «Техно-Маркет». Каждое изделие проходит обязательный многоступенчатый контроль:
Контроль сборки.
Проверку коммутации контактов.
Испытание электрических цепей.
Финальную проверку перед поставкой.
Справочные данные для монтажа и обслуживания ККТ-61
1. Типовая монтажная схема подключения
Контроллер ККТ-61 управляет двигателем путем коммутации ступеней пусковых резисторов в цепи ротора и переключения обмоток статора для реверса.
Важно: При монтаже необходимо обеспечить надежную фиксацию кабелей в зажимах, чтобы избежать перегрева контактов при пусковых токах до 100 А.
2. Таблица сменных (запасных) частей
Так как ККТ-61 работает в режиме интенсивной эксплуатации, его контакты подвержены естественному износу.
3. Рекомендации по первому пуску (контроль Техно-Маркет)
Перед вводом в эксплуатацию после монтажа необходимо:
Проверить диаграмму замыкания: Убедиться, что на каждой из 5 позиций замыкаются именно те контакты, которые предусмотрены схемой.
Контроль нажатия: Проверить плотность прилегания подвижных контактов к неподвижным в замкнутом состоянии.
Отсутствие заеданий: Рукоятка должна четко фиксироваться в каждой позиции с характерным щелчком.
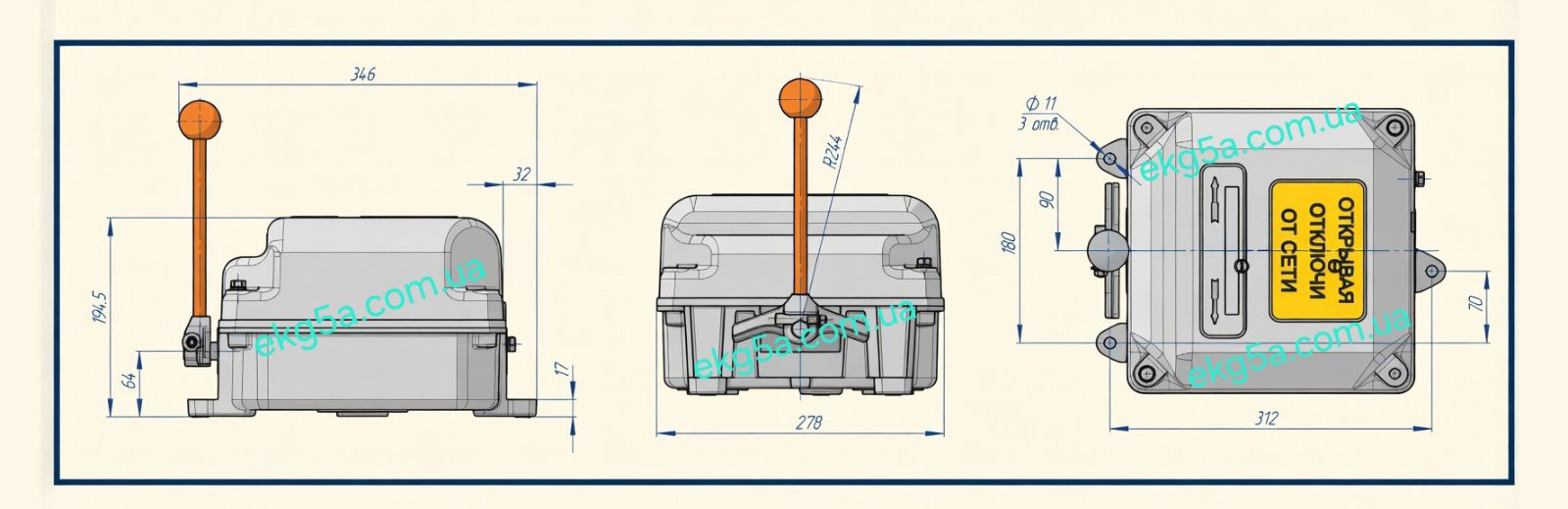
1. Габаритные и установочные размеры ККТ-61
Для правильного размещения контроллера в кабине крана или на пульте управления используйте следующие параметры:
2. Схема коммутации (диаграмма замыкания контактов)
Контроллер имеет 12 электрических цепей. При повороте рукоятки контакты замыкаются согласно стандартной схеме для управления двигателем с фазным ротором:
Нулевое положение: Все силовые контакты разомкнуты (защита от самопроизвольного пуска).
Положения 1–2 (Подъем/Спуск): Малые скорости, включено максимальное сопротивление.
Положения 3–5 (Подъем/Спуск): Постепенное выведение резисторов для разгона до номинальной скорости.
3. Таблица сменных контактов и запчастей
Учитывая высокую частоту коммутаций, рекомендуется иметь в наличии ремонтный комплект:
4. Рекомендации по монтажу и подключению
Проверка соосности: Убедитесь, что рукоятка вращается плавно, без заеданий в промежуточных положениях.
Маркировка проводов: При подключении 12 цепей обязательно используйте кабельные маркеры согласно монтажной схеме вашего крана.
Заземление: Корпус контроллера должен быть надежно присоединен к контуру заземления крана через специальный болт на станине.
Схема и таблица включения контактов ККТ-61:
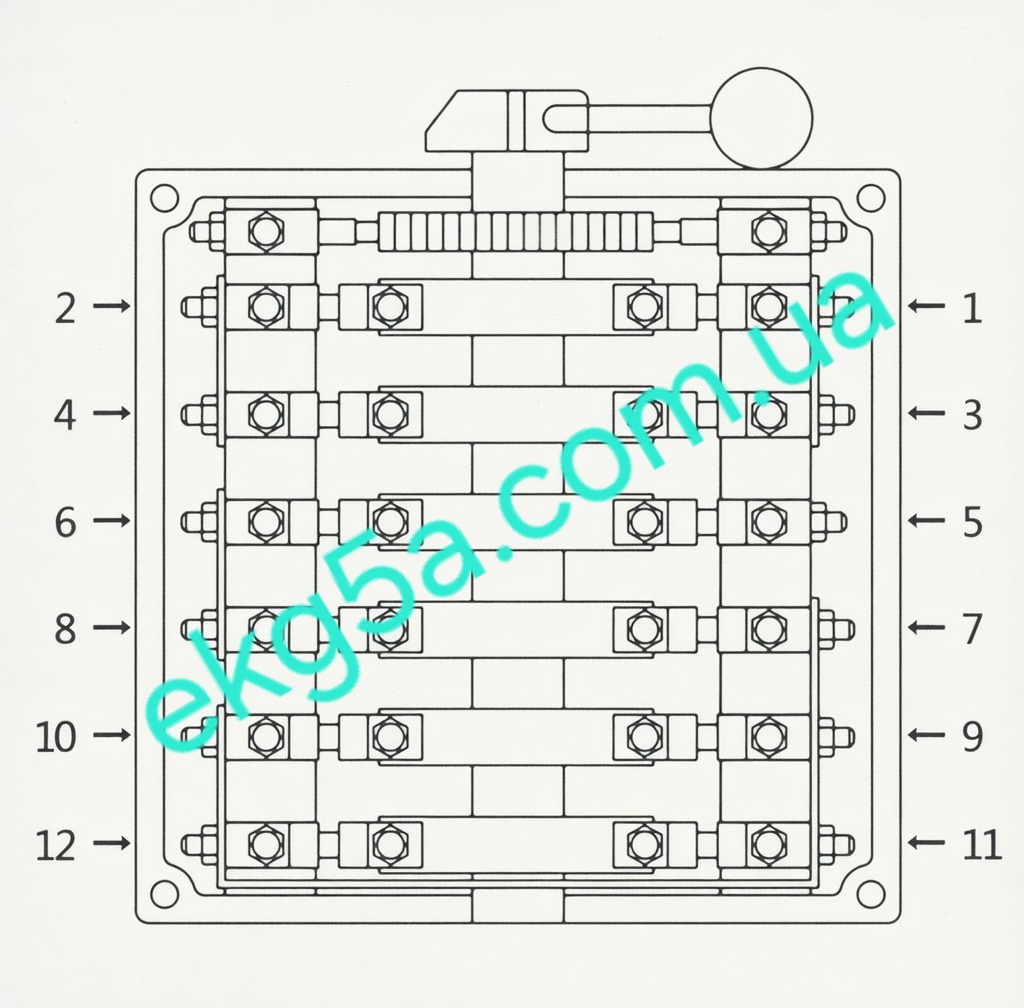

В этой таблице «Х» означает замкнутое состояние контакта, а пустая ячейка — разомкнутое.
Таблица замыкания контактов ККТ-61
Краткая расшифровка схемы:
Цепь 1: Нулевая блокировка (защита от пуска при включенном контроллере).
Цепи 2–5: Реверсивная группа (управление направлением вращения статора).
Цепи 6–12: Группа ускорения (коммутация ступеней пусковых резисторов в цепи ротора).



